Lin Li
pronounced like "Lynn Lee", and written "李淋" in Chinese.

Per Aspera ad astra sdfs
循此苦旅,终抵群星
Hello! I’m a postdoctoral researcher in the Oxford Applied and Theoretical Machine Learning (OATML) Group at the Department of Computer Science, University of Oxford, advised by Prof. Yarin Gal. I lead a research stream on the safety of multimodal foundational models as part of the Horizon Europe project, DVPS.
My research interests include (1) AI Safety, including Hallucinations, Safety Alignment, Jailbreaking, Adversarial ML. (2) LLM Agents and Social Simulation. (3) AI+ Applications in healthcare, robotics, business. My work has been published in top AI/ML venues such as ICLR, ICML, CVPR, IJCV, and featured by major media outlets including Süddeutsche Zeitung and South China Morning Post. I curate a list of information points to watch for AI Safety and Security.
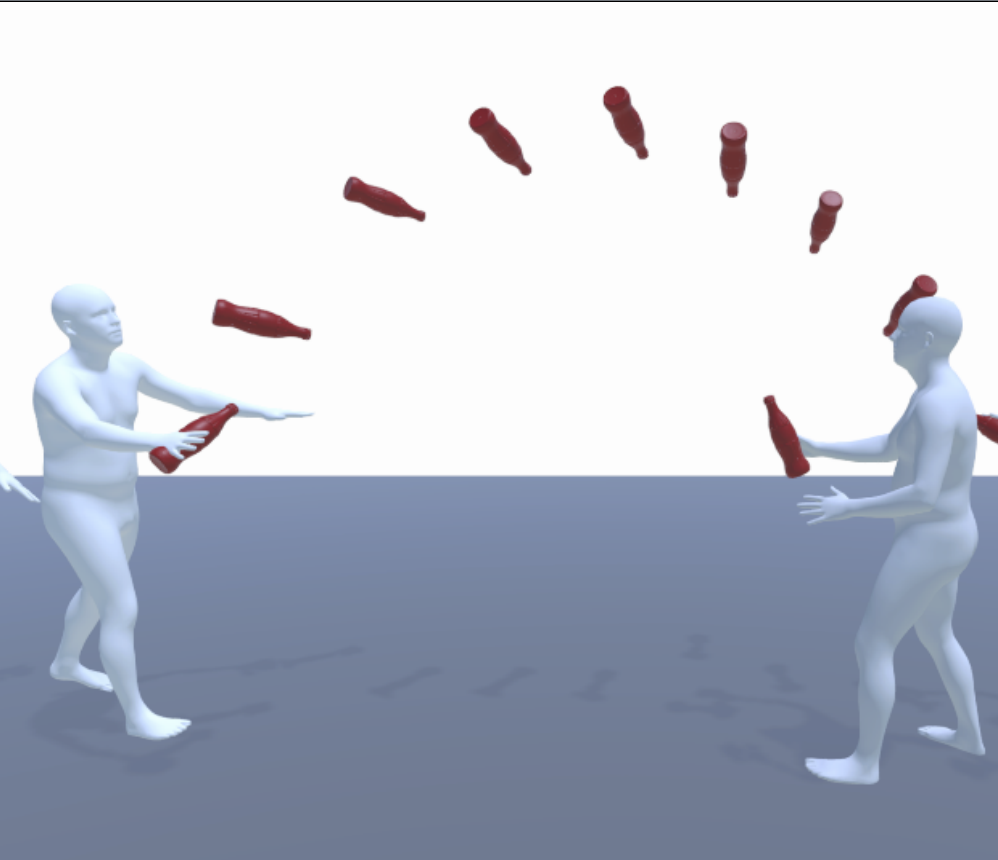
Before joining Oxford, I completed my PhD in Machine Learning at the Department of Informatics, King’s College London, supervised by Prof. Michael Spratling. During my PhD, I also interned at Tencent’s Robotics X Lab, working with Prof. Lipeng Chen on enabling robots to learn throwing and catching skills from human demonstrations.
I’m always open to collaborations and connections, so feel free to get in touch! I’m also looking for self-motivated students to explore exciting research directions together — if you’re interested, reach out and let’s grab a (cyber) ☕.
News:
| 26/03/17 | Invited by Prof. Patrick Rebeschini, to give a talk titled “From Robustness to Safety: Building Trustworthy Systems for High-Stakes Applications” as part of the Oxford ELLIS Deep Dives series. |
|---|---|
| 25/12/08 | A co-first-authored work, titled “Towards Robust Protective Perturbation against DeepFake Face Swapping”, is online on arXiv. |
| 25/12/06 | Invited by Prof. Yu Guan and Prof. Sai Gu, FREng, to give a talk titled “Towards Robust and Safe AI: An Adversarial Approach” as part of the AI Masterpiece Talk series hosted by the Outstanding Young Scholars Society, UK. |
| 25/12/04 | Gave a guest lecture on AI Safety and Security for the postgraduate course Uncertainty in Deep Learning in the Department of Computer Science, Oxford. |
| 25/08/31 | A co-authored work, titled “Energy Landscapes Enable Reliable Abstention in Retrieval-Augmented Large Language Models for Healthcare”, is accepted by NeurIPS 2025 Workshop GenAI4Health. |
| 25/06/11 | A co-authored work, titled “Reducing Large Language Model Safety Risks in Women’s Health using Semantic Entropy”, is accepted by The Lancet Obstetrics, Gynaecology, & Women’s Health. |
| 25/05/16 | Honored to be invited to speak on hallucination in AI at the AI Agents for Surgery workshop, part of the 17th Hamlyn Symposium on Medical Robotics, taking place on June 27th. |
| 25/04/29 | Hornored to be nominated for USERN Prize, an international award recognizes outstanding achievements by early-career researchers across five major scientific fields. |
| 25/03/01 | A new co-authored article, titled “Reducing Large Language Model Safety Risks in Women’s Health using Semantic Entropy”, is available at arXiv now. |
| 25/02/17 | Invited to review for ICML 2025 and NeurIPS 2025. |
| 25/02/15 | My first-authored work, Robust shortcut and disordered robustness: Improving adversarial training through adaptive smoothing, is online now at the Pattern Recognition (PR). |
| 25/02/09 | Serve as the Program Committee of the 2nd MEIS Workshop @CVPR2025. |
| 25/02/09 | Invited to review for the journals IEEE T-PAMI, IEEE T-IFS, IEEE T-DSC, and Pattern Recognition. |
| 25/01/21 | I gave an invited talk, titled “Prompting Vision-Language Models for Accuracy and Robustness”, at the Computational Health Informatics (CHI) Lab in the Department of Engineering Science at Oxford. |
| 24/11/21 | A new co-authored article, titled “Artificial Intelligence for Biomedical Video Generation”, is online at Arxiv. |
| 24/09/24 | My first-authored (equal contribution) work, Advancing robots with greater dynamic dexterity: A large-scale multi-view and multi-modal dataset of human-human throw&catch of arbitrary objects, is online now at the International Journal of Robotics Research (IJRR). |
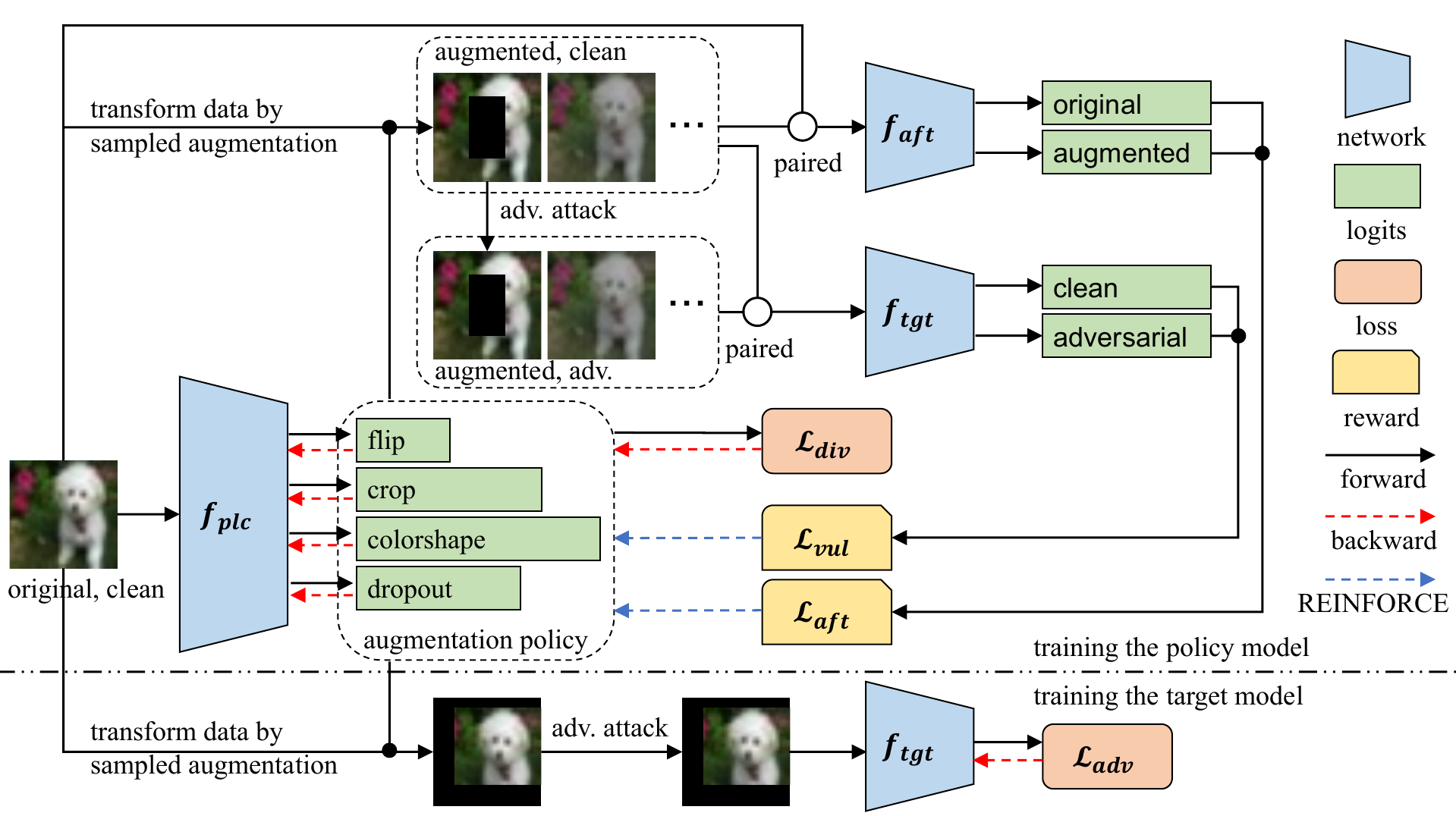
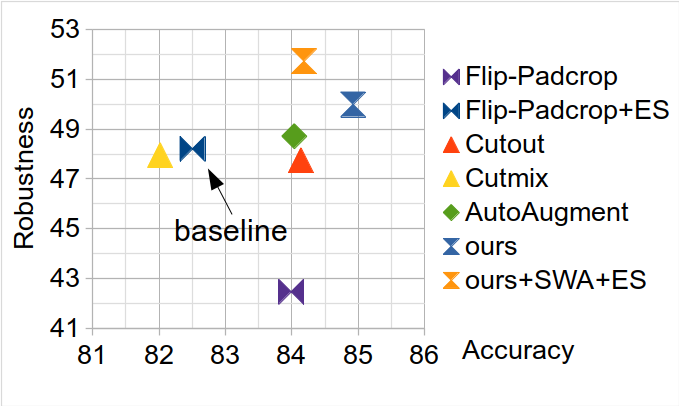
| 24/08/24 | A first-authored work, AROID: Improving Adversarial Robustness through Online Instance-wise Data Augmentation, is accepted by the International Journal of Computer Vision (IJCV). |
| 24/07/20 | Invited to serve as Program Committee for AAAI 2025. What a fancy name of reviewer! |
| 24/06/07 | A first-authored work, Advancing Robots with Greater Dynamic Dexterity: A Large-Scale Multi-View and Multi-Modal Dataset of Human-Human Throw&Catch of Arbitrary Objects, is accepted by the International Journal of Robotics Research (IJRR). |
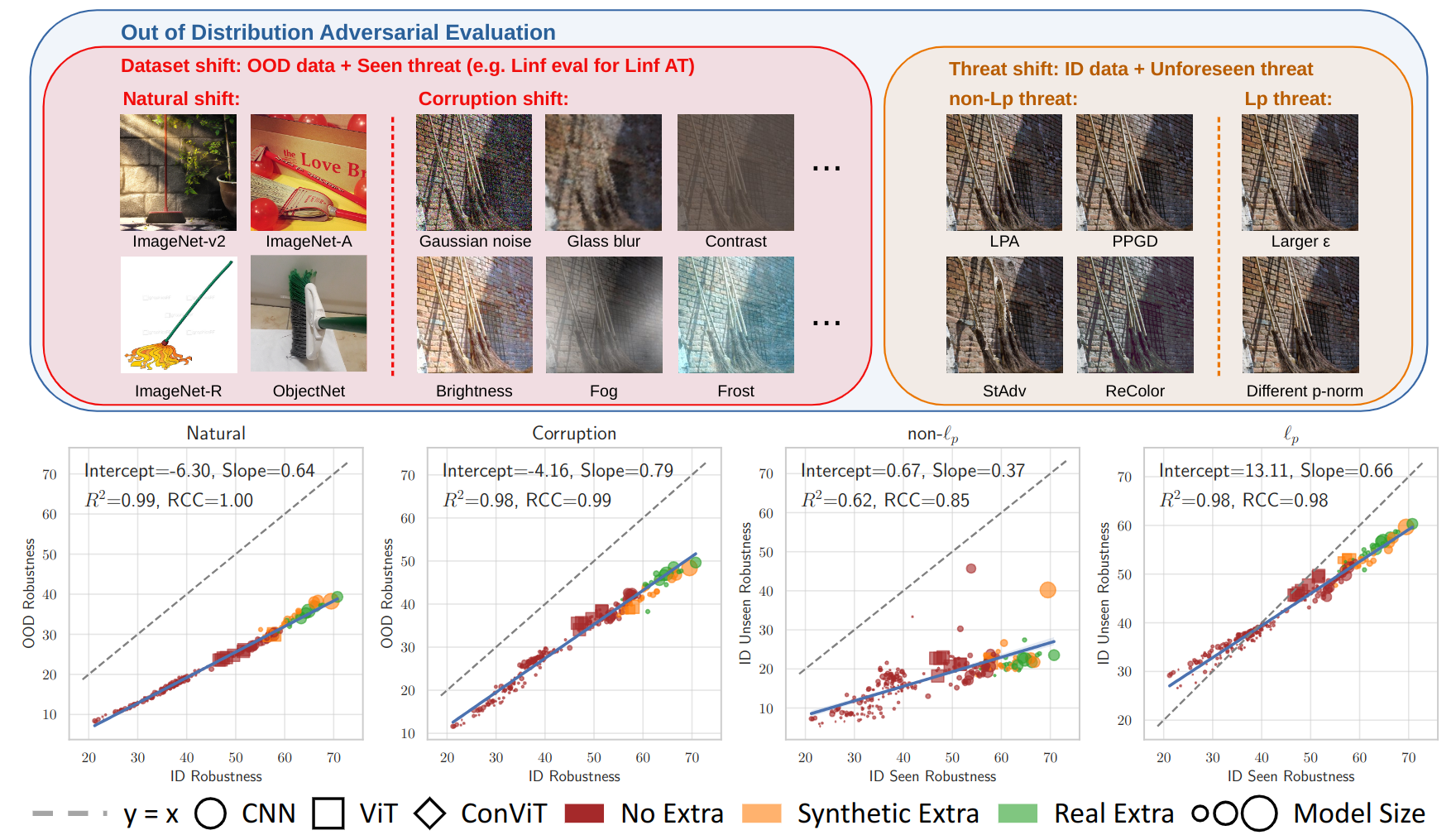
| 24/05/02 | Our work, OODRobustBench: a benchmark and large-scale analysis of adversarial robustness under distribution shift, is accepted by ICML 2024. Be careful! your adversarially robust model is probably much less robust under distribution shifts. |
| 24/04/26 | I will attend the conference VALSE2024 at Chongqing, China from 5th to 7th May and present my work of APT at the poster session (the poster ID is 331) on 6th May. Look forward to chat! |
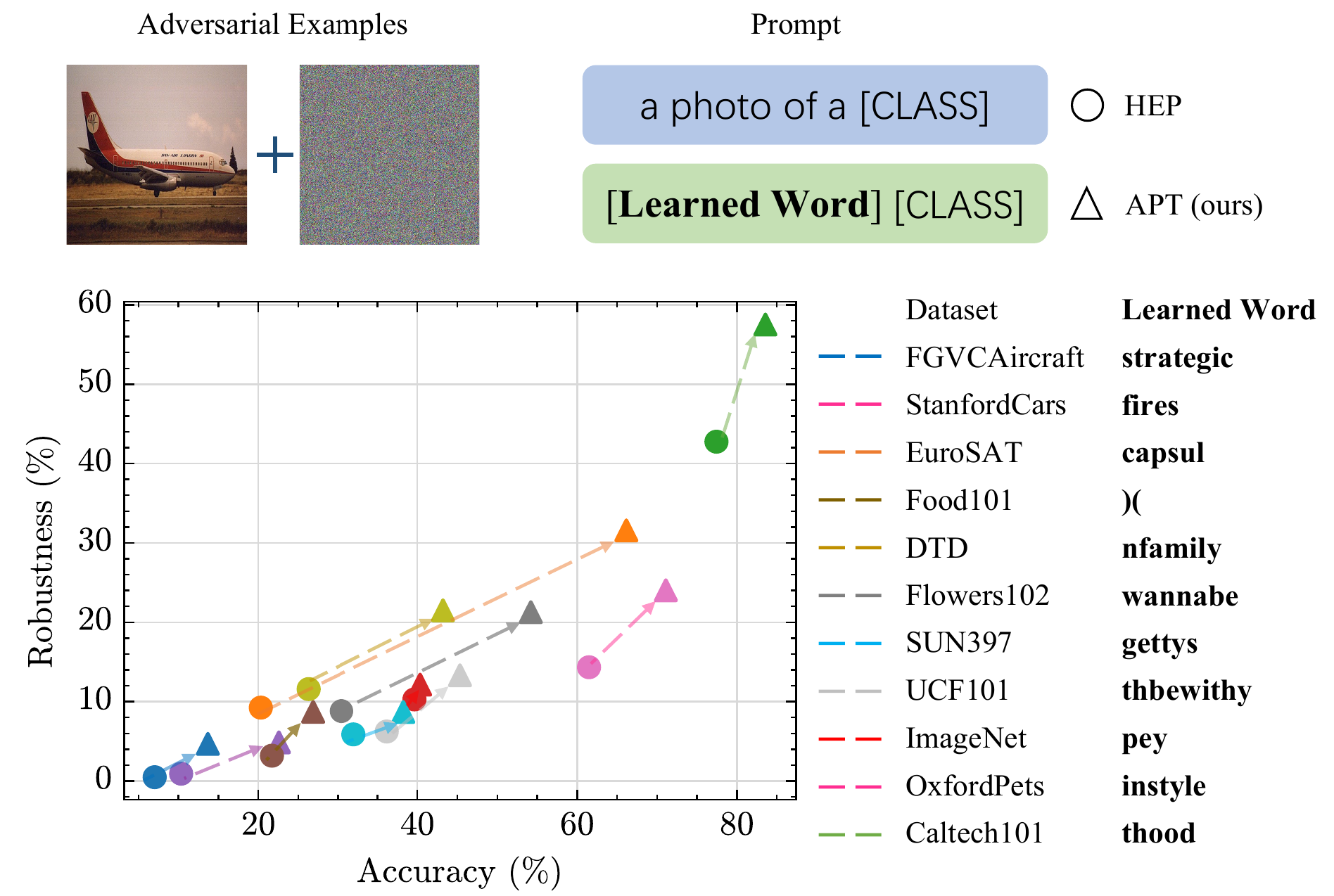
| 24/03/27 | I was invited by AI Time to give a talk of our recent CVPR2024 publication: One Prompt Word is Enough to Boost Adversarial Robustness for Pre-trained Vision-Language Models. |
| 24/03/04 | Our work, OODRobustBench: benchmarking and analyzing adversarial robustness under distribution shift, is accepted by ICLR 2024 Workshop Data-centric Machine Learning Research (DMLR) |
| 24/02/27 | One work, One Prompt Word is Enough to Boost Adversarial Robustness for Pre-trained Vision-Language Models, is accepted by CVPR2024! |
| 23/12/23 | I am invited to serve as reviewer for Internation Conference on Machine Learning (ICML) 2024. |
| 23/12/22 | I join the program committee of Workshop on Wearable Intelligence for Healthcare Robotics (WIHR): from Brain Activity to Body Movements at 2024 IEEE International Conference on Robotics and Automation (ICRA) in PACIFICO Yokohama, Japan. |
| 23/11/23 | I am invited to serve as reviewer for the journal of IEEE Transactions on Dependable and Secure Computing. |
| 23/10/24 | A new work of OODRobustBench: benchmarking and analyzing adversarial robustness under distribution shift is pre-printed on Arxiv now. |
| 23/10/08 | A new co-authored work of VisionFM: a Multi-Modal Multi-Task Vision Foundation Model for Generalist Ophthalmic Artificial Intelligence is pre-printed on Arxiv now. |
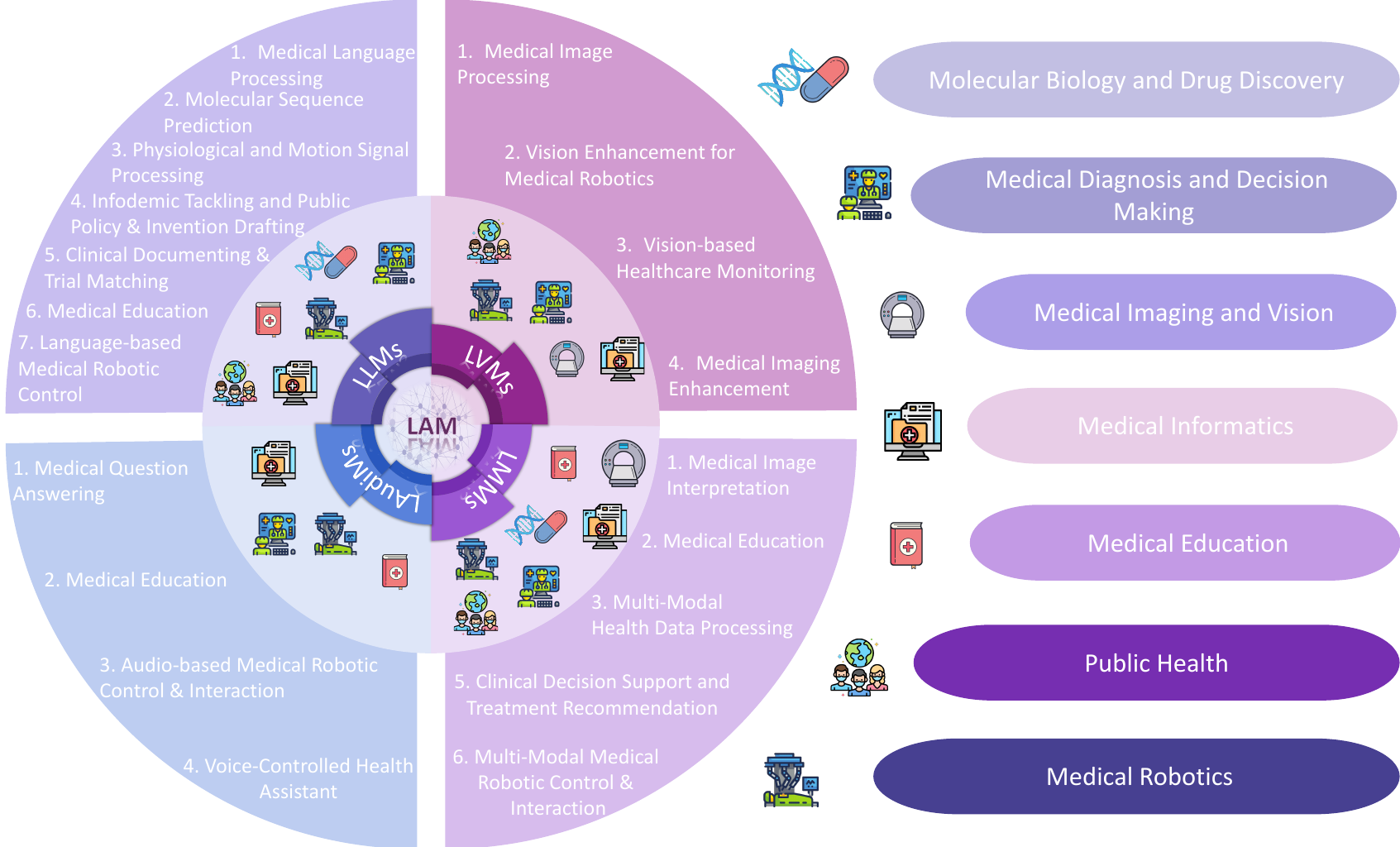
| 23/09/24 | Our review of Large AI Models, a.k.a. foundation models, in healthcare has been accepted by IEEE Journal of Biomedical and Health Informatics (JBHI). |
| 23/06/15 | I will present my research about adversarial robustness at the event King’s College London, Department of Informatics Research Showcase on 20th June, feel free to come and talk. |
| 23/06/13 | our work of improving adversarial robustness through online instance-wise automated data augmentation is pre-printed on Arxiv now. |
| 23/05/07 | I will give a talk about our ICLR2023 paper “DA alone can improve AT” on 30 May as invited by AI Time. |
| 23/04/10 | I will serve as a reviewer for NeurIPS 2023. |
| 23/03/28 | Our work of Instance-adaptive Smoothness Enhanced AT (ISEAT) is pre-printed on Arxiv now. |
| 23/03/22 | Our review of Large AI (language, vision, multi-modalities) Models a.k.a. foundation models in Health Informatics is pre-printed on Arxiv now. |
| 23/01/21 | Our work of data augmentation for adversarial training, IDBH, was accepted at ICLR2023. |
| 22/11/30 | Our work of Understanding and combating robust overfitting via input loss landscape analysis and regularization was accepted at Pattern Recognition. |
Selected Publications:
-
 International Journal of Computer Vision (IJCV), 2024
International Journal of Computer Vision (IJCV), 2024 -
 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2024
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2024 -
 International Conference on Machine Learning (ICML) and ICLRW-DMLR, 2024
International Conference on Machine Learning (ICML) and ICLRW-DMLR, 2024 -
 International Journal of Robotics Research (IJRR), 2024
International Journal of Robotics Research (IJRR), 2024 -
 International Conference on Learning Representations (ICLR), 2023
International Conference on Learning Representations (ICLR), 2023 -
 IEEE Journal of Biomedical and Health Informatics (J-BHI), 2023
IEEE Journal of Biomedical and Health Informatics (J-BHI), 2023